::产品概述::
Virtuose 6D40-40是一种带有6个自由度的触觉感测装置,又定义为“master arm”,是配备有力反馈系统的大型机台。专门为远端的机械操作遥控而设计的模拟装置。由于其嵌入的Cartesian力道控制,能运用在所有机械手臂动力测量。藉由力反馈装置,使用者可以精确的控制力量,通过远端操控,以减少工具的损害及降低环境危险的发生。

Virtuose 6D40-40是专为虚拟现实工作环境而设计的,更能有效达成模拟训练及项目开发。
工作空间
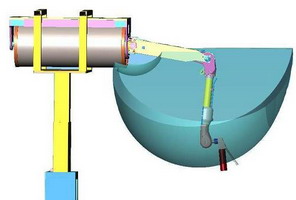
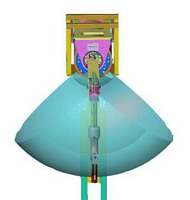
VIRTUOSE 6D40-40由固定在基座上的两个悬臂组成。第二节悬臂末端装有机械腕,可围绕三轴旋转。因此,其触觉感测介面是一个6自由度的装置,每个方向都有力反馈感应。VIRTUOSE 6D40-40的的工作空间大到足以容纳40立方公分的立方体范围。高精确度的感测0.02 mm内的位移变化以及1e-4 rad的持续出力。
Articular
| Axis nb | Clearance (°) | Continuous torque (N.m) |
| 1 | 69 | 29 |
| 2 | 73 | 22 |
| 3 | 109 | 26 |
| 4 | 326 | 4 |
| 5 | 210 | 4 |
| 6 | 510 | 4 |

::应用范围::
适用于人机工程学分析、功能测试、装配/拆卸、工作环境仿真、操作人员培训、医疗培训、远程外科手术等诸多应用领域。
::技术特征::
• 在所有6自由度(3个平移、3个旋转)上均可实现力反馈效果
• 配备有力反馈感测的手柄
• 相当于人体前臂运动的操作空间
• 每个悬臂长度∶50公分
• 最大持续出力∶30N(足以容纳40立方公分内的运动范围)
• 最大持续扭力∶3N.m(足以容纳40立方公分内的运动范围)
• 可程式化的标准 tele-operation 握把
• 机械的支架高度可调整
• 机械重量34公斤,可由两人搬运,无须其他运送装置
• 开发工具 (API)可支持主要作业系统
• 可利用外挂模组与目前市场上主要的应用软件相容,如Vortex、Havok、ODE、Virtools、CatiaV5、 OpenMask等
• 与 tele-operation 软体TAO2000™ V2相容
::下载资料::
中文版 Haption Product Overview







































































